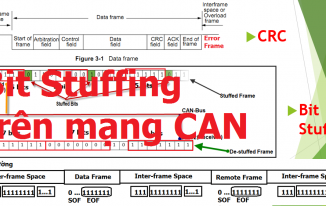
Điều làm nên tính ưu việt của mạng CAN là cơ chế giám sát của nó. Theo đó, các nút sẽ giám sát gián tiếp nhau và tự giám sát nó, thông qua việc giám sát các thông điệp. Nếu phát hiện các thông điệp có vấn đề (cũng tức là nút nào đó có vấn đề), một khung báo lỗi sẽ được gửi ngay sau khung dữ liệu data frame (hoặc khung điều khiển remote frame)
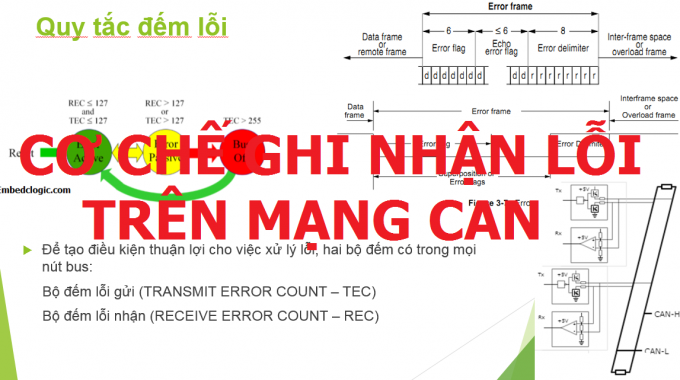
Tại các nút sẽ có bộ đếm lỗi gửi (Transmit Error Count – TEC), bộ đếm lỗi nhận (Receive Error Count – REC). Nếu là lỗi chủ động (REC, TEC nhỏ hơn hoặc bằng 127) thì khung báo lỗi chủ động sẽ từ 6 đến 12 bits 0. Và nút có lỗi chủ động có thể tham gia vào giao tiếp bus. Nếu là lỗi bị động (REC, TEC lớn hơn 127) thì khung báo lỗi bị động sẽ từ 6 đến 12 bits 1. Và nút có lỗi bị động có thể tham gia vào giao tiếp bus nhưng bị hạn chế Khi TEC lớn hơn 255 thì nút vào trạng thái Bus off, ở trạng thái này nút sẽ bị xóa khỏi mạng CAN.
Hocdienoto.com