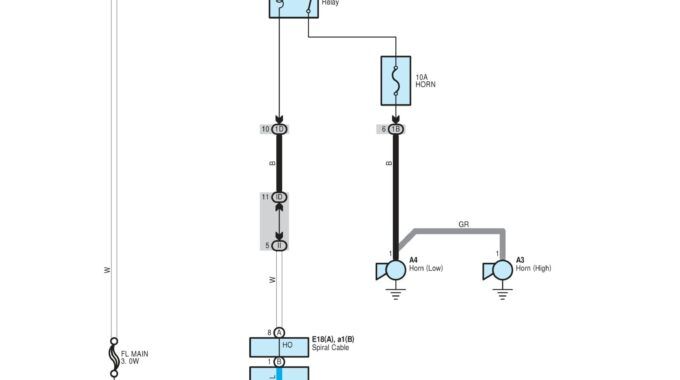
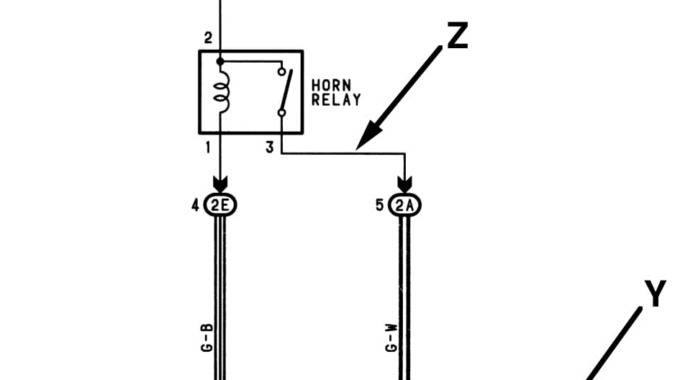
Đấu mạch, kiểm tra mạch còi đơn giản Phần này hướng dẫn đấu một mạch còi đơn giản, thực hành kiểm tra điện áp để kiểm chứng lại các nội dung lý thuyết đã học. Cần phân biệt được mạch điện thay đổi như thế nào khi công tắc còi đóng, và khi công tắc… .
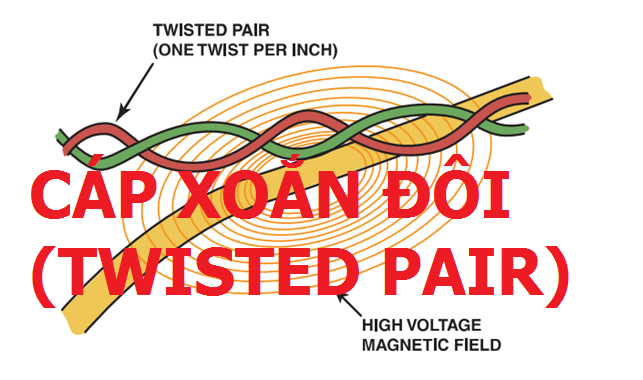
Cũng như các hệ thống điện trên ô tô, mạng CAN cũng chịu ảnh hưởng của việc nhiễu từ trường (từ trường do có dòng điện chạy trong dây dẫn). Có nhiều phương pháp để giảm thiểu sự nhiễu này, và một trong số đó là sử dụng cáp xoắn đôi để truyền tín hiệu.… .
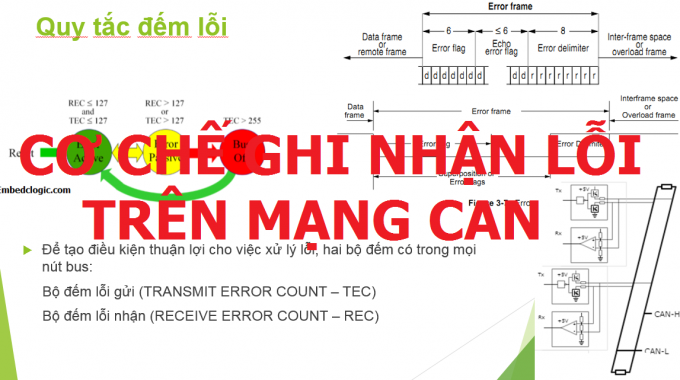
Điều làm nên tính ưu việt của mạng CAN là cơ chế giám sát của nó. Theo đó, các nút sẽ giám sát gián tiếp nhau và tự giám sát nó, thông qua việc giám sát các thông điệp. Nếu phát hiện các thông điệp có vấn đề (cũng tức là nút nào đó có… .
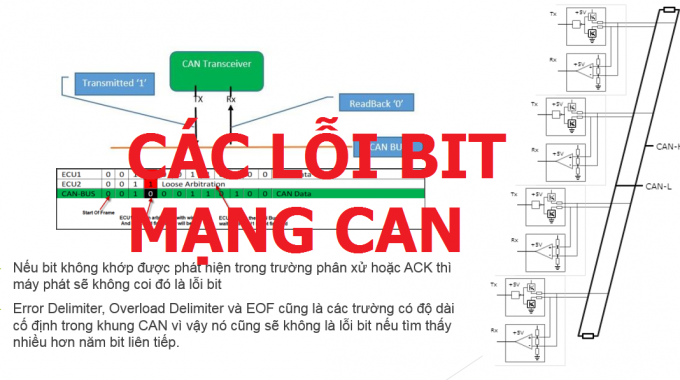
Trong quá trình các thông điệp (message) được truyền trên CAN bus có thể gặp các lỗi sau: lỗi bit (bit error), lỗi kiểm tra CRC (CRC error), stuff error (lỗi nhồi), lỗi xác nhận (ACK error), lỗi biểu mẫu (form error). Cụ thể: Lỗi bit (bit error) do bên gửi phát hiện (introduce) khi… .
Mạng CAN là một trong những giao thức có độ tin cậy cao nhất hiện nay. Các nút không giám sát trực tiếp với nhau, mà giám sát gián tiếp nhau thông qua việc giám sát các thông điệp. Các thông điệp này thể hiện trên đường bus là các frame (data frame, remote frame,… .
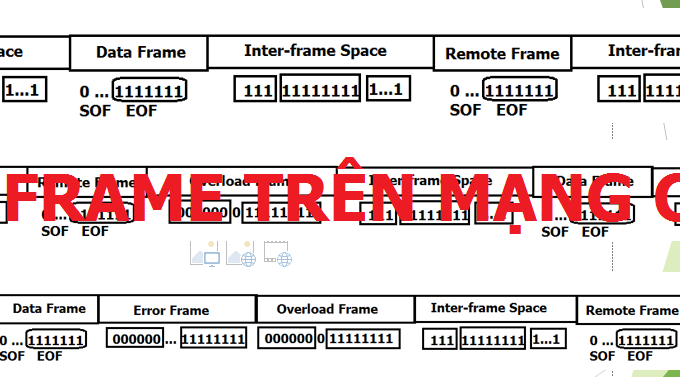
Mạng CAN trên ô tô có 5 loại frame: data frame, remote frame, error frame, overload frame và inter – frame space. Trong đó data frame là dài nhất (tối đa lên tới 108 bits), là frame chủ đạo trên mạng CAN. Remote frame được truyền khi có một nút yêu cầu một nút khác… .
Như chúng ta đã biết về khung dữ liệu gồm 7 trường: trường bắt đầu khung SOF (Start of Frame), trường phân xử (Arbitration field), trường điều khiển (Control field), trường dữ liệu (Data field), trường kiểm tra (CRC – Cyclic Redundancy Check), trường xác nhận (ACK – Acknowledge), và cuối cùng là trường kết… .
Hệ thống CAN trên ôtô sử dụng các khung sau để các module giao tiếp với nhau: khung dữ liệu (data frame), khung điều khiển (remote frame), khung báo lỗi (error frame) và khung báo tràn (overload frame). Khung dữ liệu là khung cơ bản nhất, khung dữ liệu gồm 7 trường: trường bắt đầu… .
Mạng CAN hoạt động dựa trên mức độ ưu tiên các thông điệp, chứ không quan tâm đến nguồn phát hay nguồn thu. Các thông điệp với mức ưu tiên cao sẽ được ưu tiên truyền trên bus, các thông điệp với mức ưu tiên thấp hơn sẽ truyền khi bus rảnh. Khi một module… .